Interactive 3D CAD Model
This space is reserved for an interactive 3D CAD viewer of The Frontenac, similar to the Nautical Disaster preview below.
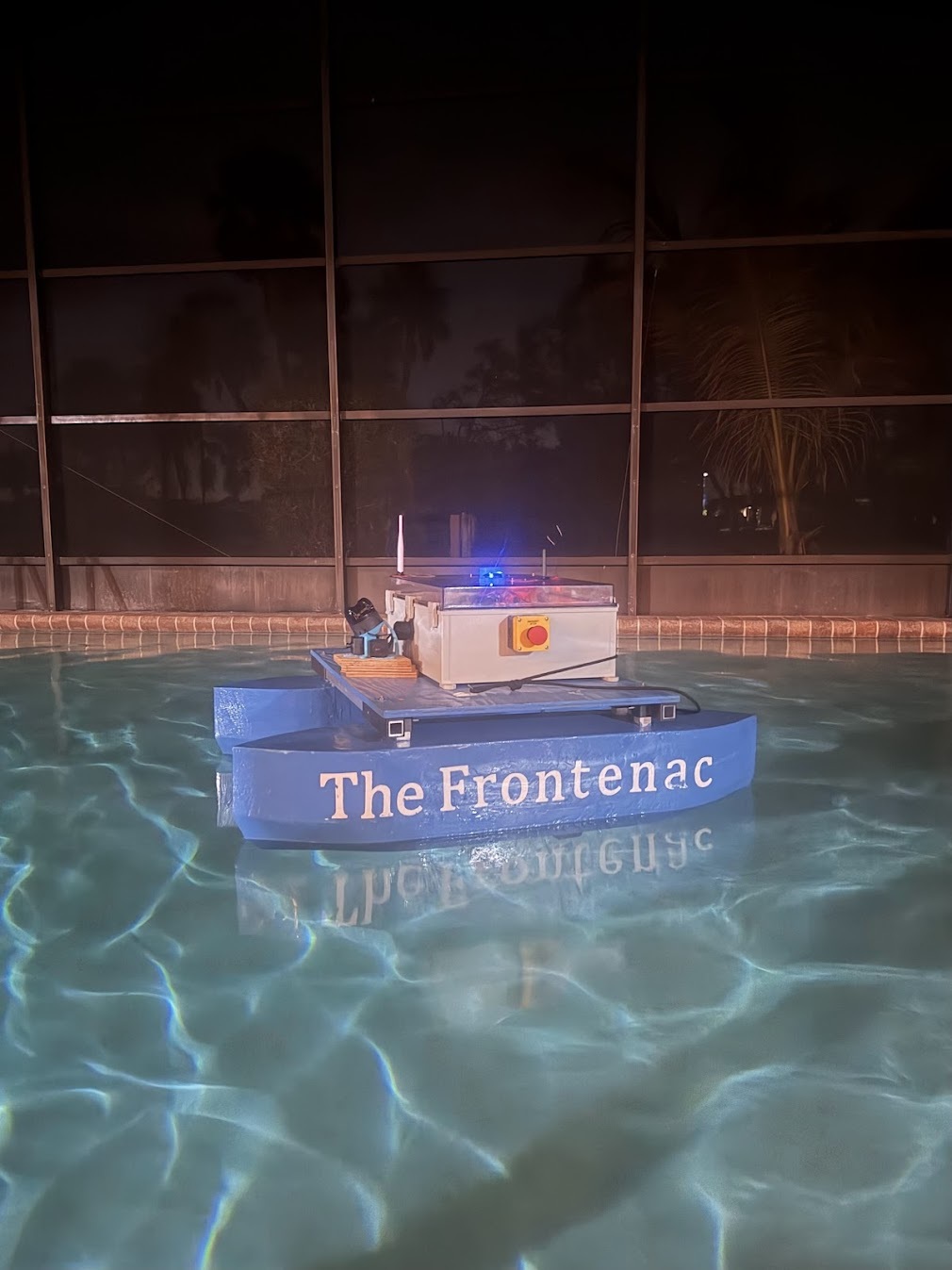




Frontenac build and competition moments
The Frontenac is our 2025–2026 Autonomous Surface Vehicle (ASV) designed for RoboNation RoboBoat. It is built around reliability, modularity, and clean integration, prioritizing consistent autonomous performance over unnecessary complexity.
Platform
Catamaran, modular architecture
Dimensions
3.55 ft L, 3.02 ft W, 1.92 ft tall
Mass and payload
45 lb mass, 150 lb max load (45 lb optimal)
Hull build
3D-printed hulls, fibreglass wrapped
The wide catamaran beam improves transverse stability and reduces roll, giving us a stable platform for sensing and autonomy. The boat is designed to disassemble quickly for transport, with the bridge, electrical system, and hulls detachable from one another.
Read our Technical Design Report
Frontenac details sourced from the RoboBoat 2026 Technical Design Report PDF.
RoboBoat 2025 ASV, builds, photos, specs, and story
Nautical Disaster is our Autonomous Surface Vehicle (ASV) designed to compete in the Roboboat 2025 competition. Named after Kingston's home grown band, The Tragically Hip , our vehicle is a showcase of engineering, innovation, and teamwork.





📸 Competition moments from RoboBoat 2025
Every inch of Nautical Disaster is built with care by our team. From shaping plywood to layering fiberglass, we’re hands-on every step of the way. It’s not just about building a boat, it’s about creating something we’re proud of.
Whether it’s figuring out tricky assembly pieces or sharing laughs over late-night builds, this project is as much about teamwork as it is about engineering. Everyone’s skills, ideas, and elbow grease come together to make this ASV the best it can be.
This is what happens when creativity, collaboration, and a shared goal collide. The result? A tough, reliable, and competition-ready ASV we can’t wait to see in action.

Harnessing the precision of dual T200 thrusters combined with advanced path-planning algorithms. Experience seamless transitions through obstacles, ensuring maximum maneuverability.
Equipped with 3D LiDAR and high-resolution cameras, the ASV identifies and tracks objects in real-time. This layered sensory input ensures dynamic navigation even in challenging environments.
Dual-layer safety protocols include physical and remote emergency stops. Combined with redundancy in communication, the system guarantees operational safety.
Modular hulls and bridge layouts support ecological research tools while remaining transport-friendly. Built to last with marine-grade materials.

Operators can focus on decisions rather than data correlation. Real-time segmentation tracks buoys, obstacles, and routes, presenting clear actionable steps at critical moments.
A layered approach, combining Potential Fields Algorithm and ROS2-based control, ensures that the ASV responds quickly and efficiently to dynamic challenges.
| Component | Vendor | Model/Type | Specs |
|---|---|---|---|
| ASV Hull Form/Platform | Custom-built | Dual-hull marine platform | Fiberglass-wrapped plywood and closed-cell foam; 140 lbs max capacity, optimal 55-70 lbs |
| Waterproof Connectors | Not specified | Liquid-tight cord grips | O-rings and elevated bases for waterproofing |
| Propulsion | Blue Robotics | T200 Thruster | 180° rotation, 22A max current, 15.26V |
| Power System | Blue Robotics | Lithium Polymer Battery | 10Ah, 14.8V, 24A max; dual batteries connected in parallel |
| Motor Controls | SureStep | STP-MTR-23055 | Bipolar stepper motors, 2.8A, 15.26V with A4988 stepper drivers |
| CPU | Nvidia | Jetson Nano | Runs perception and control algorithms; connects to Pixhawk and sensors |
| Teleoperation | Multiple | RC Radio, Wi-Fi Bullet | Ubiquiti airMAX Bullet M2 for telemetry, RC radio for manual control |
| Compass | Pixhawk | Internal | Integrated IMU for orientation |
| Inertial Measurement Unit (IMU) | Pixhawk | Internal | Gyroscope-based; determines angular and linear movement |
| Camera(s) | Custom | Front and side cameras | Used for buoy and obstacle detection; integrated with Jetson |
| Algorithms | Custom | Perception and Planning | Left-right buoy navigation, potential fields for obstacle avoidance |
| Vision | Unitree | 4D LiDAR L1 | Secondary obstacle detection, 3-section segmentation |
| Localization and Mapping | Custom | GPS and IMU Integration | ROS2 and Mavros middleware for mapping and navigation |
| Autonomy | Custom | Path Planning Algorithms | Includes A*, Dijkstra's, and ROS-based navigation |
| Open-Source Software | Custom | ROS2, Mavros | Middleware for communication and control |
